Error Sources
Satellite Clocks
The atomic clocks in the GNSS satellites are very accurate, but they do drift a small amount. Unfortunately, a small inaccuracy in the satellite clock results in a significant error in the position calculated by the receiver. For example, 10 nanoseconds of clock error results in 3 metres of position error.
The clock on the satellite is monitored by the GNSS ground control system and compared to the even more accurate clock used in the ground control system. In the downlink data, the satellite provides the user with an estimate of its clock offset. Typically, the estimate has an accuracy of about ±2 metres, although the accuracy can vary between different GNSS systems. To obtain a more accurate position, the GNSS receiver needs to compensate for the clock error.
One way of compensating for clock error is to download precise satellite clock information from an Spaced Based Augmentation System (SBAS) or Precise Point Positioning (PPP) service provider. The precise satellite clock information contains corrections for the clock errors that were calculated by the SBAS or PPP system. More information about SBAS and PPP is provided in Chapter 5.
Another way of compensating for clock error is to use a Differential GNSS or Real Time Kinematic (RTK) receiver configuration. Chapter 5 discusses Differential GNSS and RTK in depth.
Orbit Errors
GNSS satellites travel in very precise, well known orbits. However, like the satellite clock, the orbits do vary a small amount. Also, like the satellite clocks, a small variation in the orbit results in a significant error in the position calculated.
The GNSS ground control system continually monitors the satellite orbit. When the satellite orbit changes, the ground control system sends a correction to the satellites and the satellite ephemeris is updated. Even with the corrections from the GNSS ground control system, there are still small errors in the orbit that can result in up to ±2.5 metres of position error.
One way of compensating for satellite orbit errors is to download precise ephemeris information from an SBAS system or PPP service provider. SBAS and PPP are discussed further in Chapter 5.
Another way of compensating for satellite orbit errors is to use a Differential GNSS or RTK receiver configuration. More information about Differential GNSS and RTK is provided in Chapter 5.
Ionospheric Delay
The ionosphere is the layer of atmosphere between 80 km and 600 km above the earth. This layer contains electrically charged particles called ions. These ions delay the satellite signals and can cause a significant amount of satellite position error (Typically ±5 metres, but can be more during periods of high ionospheric activity).
Ionospheric delay varies with solar activity, time of year, season, time of day and location. This makes it very difficult to predict how much ionospheric delay is impacting the calculated position.
Ionospheric delay also varies based on the radio frequency of the signal passing through the ionosphere. GNSS receivers that can receive more than one GNSS signal, L1 and L2 for example, can use this to their advantage. By comparing the measurements for L1 to the measurements for L2, the receiver can determine the amount of ionospheric delay and remove this error from the calculated position.
For receivers that can only track a single GNSS frequency, ionospheric models are used to reduce ionospheric delay errors. Due to the varying nature of ionospheric delay, models are not as effective as using multiple frequencies at removing ionospheric delay.
Ionospheric conditions are very similar within a local area, so the base station and rover receivers experience very similar delay. This allows Differential GNSS and RTK systems to compensate for ionospheric delay.
Tropospheric Delay
The troposphere is the layer of atmosphere closest to the surface of the Earth.
Variations in tropospheric delay are caused by the changing humidity, temperature and atmospheric pressure in the troposphere.
Since tropospheric conditions are very similar within a local area, the base station and rover receivers experience very similar tropospheric delay. This allows Differential GNSS and RTK systems to compensate for tropospheric delay.
GNSS receivers can also use tropospheric models to estimate the amount of error caused by tropospheric delay.
Receiver Noise
Receiver noise refers to the position error caused by the GNSS receiver hardware and software. High end GNSS receivers tend to have less receiver noise than lower cost GNSS receivers.
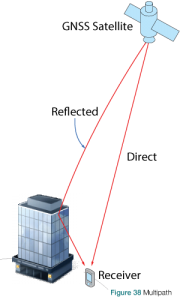
Multipath
Multipath occurs when a GNSS signal is reflected off an object, such as the wall of a building, to the GNSS antenna. Because the reflected signal travels farther to reach the antenna, the reflected signal arrives at the receiver slightly delayed. This delayed signal can cause the receiver to calculate an incorrect position.
Long delay multipath errors are typically handled by the GNSS receiver, while short delay multipath errors are handled by the GNSS antenna. Due to the additional technology required to deal with multipath signals, high end GNSS receivers and antennas tend to be better at rejecting multipath errors.
Closing Remarks
This chapter has described the errors sources that cause inaccuracies in the calculation of position. In Chapter 5, we will describe the methods that GNSS receivers use to mitigate these errors and provide a more accurate position.