Real-Time Kinematic (RTK)
The positioning technique we described in Chapter 2 is referred to as code-based positioning, because the receiver correlates with and uses the pseudorandom codes transmitted by four or more satellites to determine the ranges to the satellites. From these ranges and knowing where the satellites are, the receiver can establish its position to within a few metres.
What is RTK (Real-Time Kinematic)?
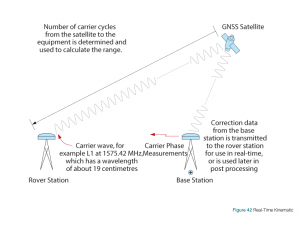
RTK stands for Real-Time Kinematic and is a technique that uses carrier-based ranging and provides ranges (and therefore positions) that are orders of magnitude more precise than those available through code-based positioning. RTK techniques are complicated. The basic concept is to reduce and remove errors common to a base station and rover pair, as illustrated in Figure 42.
RTK GPS Accuracy: What accuracy is RTK?
RTK is used for applications that require higher accuracies, such as centimetre-level positioning, up to 1 cm + 1 ppm accuracy.
Range Calculation
At a very basic conceptual level, the range is calculated by determining the number of carrier cycles between the satellite and the rover station, then multiplying this number by the carrier wavelength.
The calculated ranges still include errors from such sources as satellite clock and ephemerides, and ionospheric and tropospheric delays. To eliminate these errors and to take advantage of the precision of carrier-based measurements, RTK performance requires measurements to be transmitted from the base station to the rover station.
A complicated process called “ambiguity resolution” is needed to determine the number of whole cycles. Despite being a complex process, high precision GNSS receivers can resolve the ambiguities almost instantaneously. For a brief description of ambiguities, see the GNSS Measurements–Code and Carrier Phase Precision section earlier in this chapter. For further information about ambiguity resolution, see the references at the back of this book.
Rovers determine their position using algorithms that incorporate ambiguity resolution and differential correction. Like DGNSS, the position accuracy achievable by the rover depends on, among other things, its distance from the base station (referred to as the “baseline”) and the accuracy of the differential corrections. Corrections are as accurate as the known location of the base station and the quality of the base station’s satellite observations. Site selection is important for minimizing environmental effects such as interference and multipath, as is the quality of the base station and rover receivers and antennas.
Network RTK
Network RTK is based on the use of several widely spaced permanent stations. Depending on the implementation, positioning data from the permanent stations is regularly communicated to a central processing station. On demand from RTK user terminals, which transmit their approximate location to the central station, the central station calculates and transmits correction information or corrected position to the RTK user terminal. The benefit of this approach is an overall reduction in the number of RTK base stations required. Depending on the implementation, data may be transmitted over cellular radio links or other wireless medium.