GNSS Data Post-Processing
For many applications, such as airborne survey, corrected GNSS positions are not required in real-time. For these applications, raw GNSS satellite measurements are collected and stored for processing post-mission. Unlike RTK GNSS positioning, post-processing does not require real-time transmission of differential correction messages. This simplifies the hardware configuration greatly.
During post-processing, base station data can be used from one or more GNSS receivers. Multi-base processing helps preserve high accuracy over large project areas, which is a common occurrence for aerial applications. Depending on the project’s proximity to a permanently operating GNSS network, base station data can often be freely downloaded, eliminating the need for establishing your own base station(s). Moreover, it is possible to process without any base station data through PPP, which utilizes downloaded precise clock and ephemeris data.
Post-processing applications offer a great deal of flexibility. Applications can involve stationary or moving base stations, and some support integration with customer or third-party software modules. Post-processing applications may be designed to run on personal computers, accessible through simple-to-use graphical user interfaces.
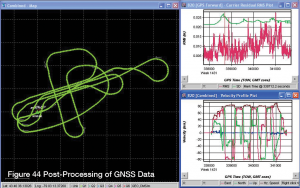
In the example shown in Figure 44, the route taken by the vehicle is shown in the left side of the screen, and measurements recorded during the mission, such as velocity, resolved into horizontal and vertical components, are shown in the right side.
Post-processing generally results in a more accurate, comprehensive solution than is possible in real-time.
Which Correction Method?
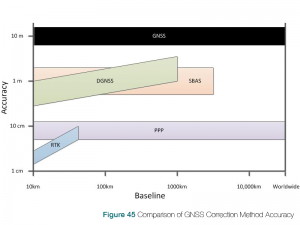
As discussed at the start of this chapter, there is no best GNSS correction method, only a method that best suites the intended application. Figure 45 compares the accuracy and practical range of use for each of the methods discussed in this chapter. The following sections provide comparisons between the correction methods.
DGNSS vs RTK
The configuration of Differential GNSS (DGNSS) and RTK systems are similar in that both methods require a base station receiver setup at a known location, a rover receiver that gets corrections from the base station and a communication link between the two receivers. The difference is that RTK (a carrier phase method) is significantly more accurate than DGNSS (a code-based method).
The advantage of DGNSS is that it is useful over a longer baseline (distance between base station and rover receivers) and a DGNSS system is less expensive. The technology required to achieve the higher accuracy of RTK performance makes the cost of a RTK-capable receiver higher than one that is DGNSS-capable only.
SBAS vs PPP
An SBAS system and a PPP system are similar in that both systems receive corrections from satellites. However, a PPP system is significantly more accurate than an SBAS system. Part of the accuracy advantage is the correction method. PPP systems use the carrier phase method and SBAS systems use the code method. The other part of the accuracy advantage is that the private corrections services typically used by PPP systems provide higher quality corrections and are multi-frequency, multi-constellation.
The advantage of SBAS systems is that the corrections services are free for everyone to use. While the private corrections services provide higher quality corrections and are available world wide, a paid subscription is required to access the signals. Also, since SBAS is a code-based method, there are no ambiguities to resolve and full SBAS accuracy is available almost immediately. PPP systems require time to converge (resolve ambiguities) before full accuracy is available.
DGNSS vs SBAS
While the accuracy of DGNSS and SBAS are similar, the equipment required for the systems is different.
An SBAS system only requires an SBAS capable receiver and a GNSS antenna. A DGNSS system requires a base station receiver and antenna, a rover receiver and antenna and a communication link between the base station and rover. As well, the DGNSS system requires additional system setup as the base station must be in a known location.
RTK vs PPP
Like DGNSS and SBAS, RTK and PPP offer similar accuracies, but the equipment and setup required is different.
An RTK system offers higher accuracy and quick initialization, but is more complex to setup and more expensive. The RTK system requires at least two RTK capable receivers (one base station and one or more rovers), a GNSS antenna for each receiver and a communication link between the receivers. Also, to achieve the high level of accuracy, the base station must be very precisely set up at a known location.
A PPP system has a simpler configuration; a single PPP compatible receiver, an antenna capable of receiving GNSS and L-Band frequencies and a subscription to a corrections service provider. However, PPP has a somewhat lower accuracy and longer initial convergence time.
Another differentiator is the baseline length. The distance between base station and rover (baseline length) on an RTK system directly impacts system accuracy. At short baseline lengths, a few kilometres, RTK is very accurate. However, as the baseline length increases, the accuracy and availability of a solution decreases. At long baseline lengths RTK can no longer be used. Because PPP does not use a base station, it is not affected by baseline length and can provide full accuracy anywhere in the world.
Closing Remarks
This chapter has described, at a high level, some very complex GNSS concepts. If you want to learn more about these, we have provided a list of references at the end of the book.